Blind Nav
- AWS, PCL, Unity
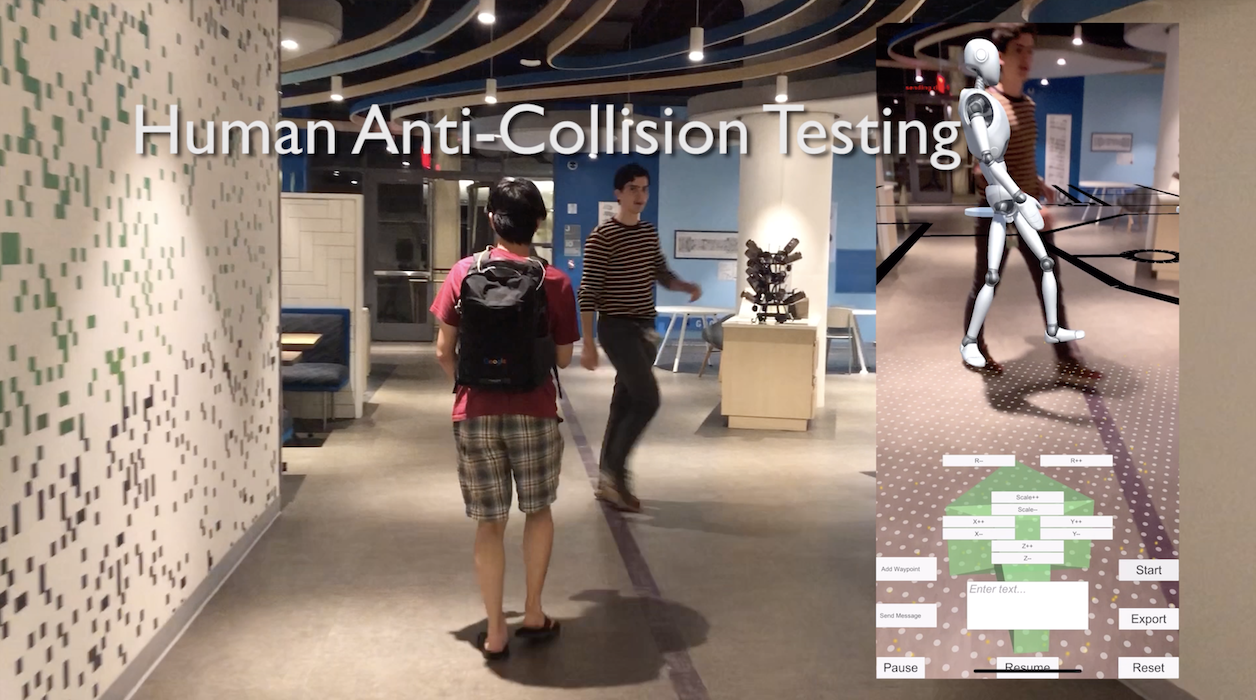
Navigation is a difficult challenge for the blind. Especially in unfamiliar locations, it is difficult to go anywhere when so much of navigation is reliant on visual cues. The goal of the project was to navigate within a building from room to room, completely blindfolded.
Read More...